Клипњача за утоваривач точкаш резервни делови за утоваривач точкаш КСЦМГ Лиугонг

Клипњача
Пошто постоји много врста резервних делова, не можемо их све приказати на веб страници. Слободно нас контактирајте за одређене.
Предност
1. За вас испоручујемо оригиналне и постмаркет производе
2. Од произвођача до купца директно, штедећи ваше трошкове
3. Стабилна залиха за нормалне делове
4. У времену испоруке, са конкурентним трошковима испоруке
5. Професионално и на време након услуге
Паковање
Картонске кутије, или према захтеву клијената.
опис
Функција клипњаче је да повеже клип и радилицу, тако да повратно линеарно кретање клипа постаје ротационо кретање радилице према излазној снази.
Тело клипњаче се састоји од три дела, део који је повезан са клипом назива се мали крај клипњаче; део спојен са радилицом назива се велики крај клипњаче, а шипка која повезује мали крај и велики крај назива се осовина клипњаче. Мала глава клипњаче је углавном кружна прстенаста структура танких зидова. Да би се смањило хабање између клипа и клипа, бронзана чаура танког зида је утиснута у мали отвор за главу. Избушите или изглодајте жлебове на малој глави и чаури да би прскано уље ушло у површину за спајање чауре за подмазивање и клипног клипа. Осовина клипњаче је дугачка шипка, а сила је такође велика у раду. Да би се спречило његово савијање и деформација, осовина мора имати довољну крутост.
Према томе да ли је релативно кретање између компоненти кретање у равни или у простор, механизам за повезивање се може поделити на механизам за раван и механизам за просторно повезивање. Механизам везе у равни је уобичајен механизам преноса. То значи да су све круте компоненте повезане ниским паровима, па се назива и механизам ниског пара. Механизам за раван везу се широко користи у различитим машинама, инструментима и контролним уређајима. Као што су клипни мотори, пумпе и ваздушни компресори, као и ренде, машине за прорезивање, багери, утоваривачи, чељусти дробилице, покретне траке, машине за штампање, текстилне машине, итд., Главни механизми су равни механизми за повезивање. У механизму повезивања, ако се компоненте не крећу у истој равни или паралелно једна са другом, механизам се назива просторни механизам. [3] Према броју компоненти у механизму, дели се на механизам са четири шипке, механизам са пет шипки, механизам са шест шипки, итд. Генерално, механизми са петом шипком и више од пет шипки се називају вишеструки -бар механизми. Када је степен слободе механизма везе 1, он се назива механизмом везе са једним степеном слободе; када је степен слободе већи од 1, то се назива механизам везе вишеструког степена слободе.
У зависности од тога да ли је кинематички ланац који формира механизам за повезивање отворени ланац или затворени ланац, одговарајући механизам повезивања се такође може поделити на механизам повезивања отвореног ланца (манипулатор је обично просторни механизам за повезивање отвореног ланца у коме је кинематички пар ротирајући пар или покретни пар) И механизам за повезивање затвореног ланца. Број компоненти једног механизма за раван везе затворене петље је најмање 4, тако да је најједноставнији планарни механизам затвореног ланца механизам са четири полуге, а други механизми са више карика са затвореним ланцем нису ништа друго до проширење група штапова на његовој основи; појединачна затворена петља Број компоненти механизма просторног повезивања је најмање 3, тако да три компоненте могу формирати просторни механизам са три шипке.
Компоненте механизма везе имају различите облике кретања, као што су ротација, замах, кретање и сложено кретање у равни или простору, који се могу користити за реализацију познатих закона кретања и познатих путања.
Предности
(1) Низак пар: површински контакт, велико оптерећење, лако се подмазује, није лако за ношење, једноставан облик, лака обрада, лако се постиже висока тачност производње.
(2) Променом релативне дужине штапа, закон кретања следбеника је другачији.
(3) Контакт између две компоненте се одржава сопственим геометријским затварањем, за разлику од зупчастих механизама који понекад морају да користе опруге и друге силе затварања да би одржали контакт.
(4) Крива клипњаче је богата, што може испунити различите захтеве.
Недостаци
(1) Постоји много компоненти и парова покрета, велика кумулативна грешка, мала тачност кретања и ниска ефикасност.
(2) Генерише се динамичко оптерећење (инерцијална сила) и није лако балансирати и није погодно за велике брзине.
(3) Дизајн је сложен и тешко је постићи прецизне путање.
Због тога се механизам раванског повезивања широко користи у различитим машинама, инструментима и електромеханичким производима. Са развојем метода пројектовања механизама везе, популарном применом електронских рачунара и развојем сродног софтвера за пројектовање, брзина пројектовања и тачност дизајна механизама везе су значајно побољшане, а уз испуњавање кинематичких захтева, такође се може сматрати да динамику. Конкретно, увођење микроелектронске технологије и технологије аутоматске контроле, као и усвајање механизма повезивања са више степена слободе у великој мери поједностављују структуру и дизајн механизма за повезивање и имају шири спектар примена.
Наш-магацин1

Спакујте и отпремите

- Ваздушно дизало
- Кина кипер камион
- Цолд Рецицлер
- Цоне Црусхер Линер
- Бочни подизач контејнера
- Дади Булдожер Парт
- Додатак за чишћење виљушкара
- Хбкг Делови булдожера
- Хово Мотор Партс
- Хидраулична пумпа Хиундаи багера
- Коматсу булдожер делови
- Коматсу зупчасто вратило багера
- Хидраулична пумпа за багер Коматсу Пц300-7
- Делови булдожера Лиугонг
- Сани резервни делови за пумпе за бетон
- Сани резервни делови за багере
- Схацман делови мотора
- Схантуи булдожер вратило квачила
- Схантуи булдожер прикључна осовина Пин
- Флексибилно вратило за управљање булдожером Схантуи
- Флексибилна осовина булдожера Схантуи
- Комплет за поправку цилиндра за подизање булдожера Схантуи
- Делови булдожера Схантуи
- Схантуи Булдожер Реел Схафт
- Схантуи булдожер вратило зупчаника уназад
- Резервни делови за булдожере Схантуи
- Погонска осовина витла Схантуи Булдожера
- Шантуи Дозер Болт
- Схантуи Дозер Фронт Идлер
- Комплет за поправку цилиндра нагибног булдожера Схантуи
- Схантуи Сд16 Бевел Геар
- Схантуи Сд16 Кочна облога
- Склоп врата Схантуи Сд16
- Схантуи Сд16 О-прстен
- Схантуи Сд16 гусеничарски ваљак
- Схантуи Сд22 Беаринг Слееве
- Схантуи Сд22 Фрикциони диск
- Схантуи Сд32 Трачни ваљак
- Синотрук делови мотора
- Шлеп камион
- Ксцмг Делови булдожера
- Ксцмг резервни делови за булдожере
- Ксцмг Хидраулична брава
- Ксцмг Трансмиссион
- Иуцхаи делови мотора
Категорије производа
-
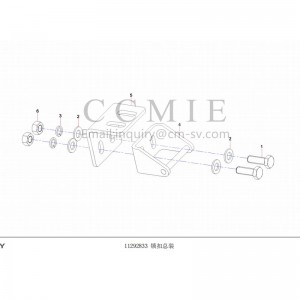
11292833 брава склоп за багер резервни делови
-

171-51-27000 Поклопац (за скарификатор) Схантуи СД32...
-
803081782 вишесмерни вентил КСЦМГ ВЗ30-25 багер ...
-

8053Г0814 Васхер 10 КСЦМГ ЛВ600КН утоваривач точкаш п...
-

16И-18-00019 Лева спољна шкољка
-

П10И-80-00005В010 Угаона оштрица ножа за суво млевење ...